
Arduino Circuits – Ultrasonic sensor
Ultrasonic Sensor – HC-SR04

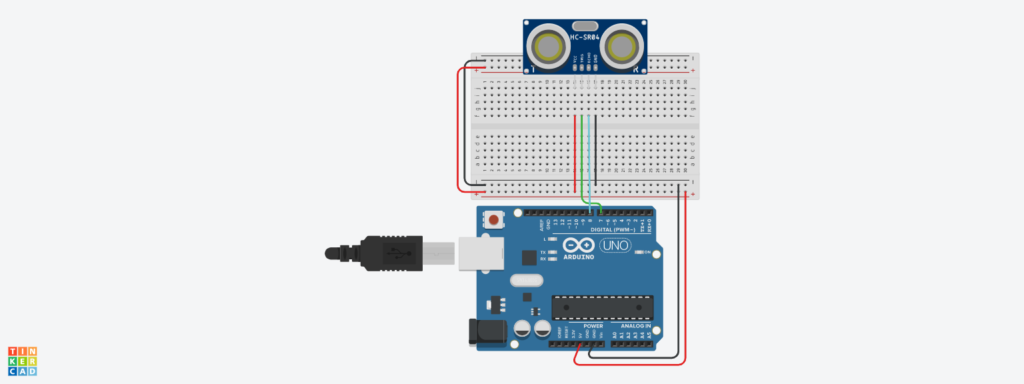
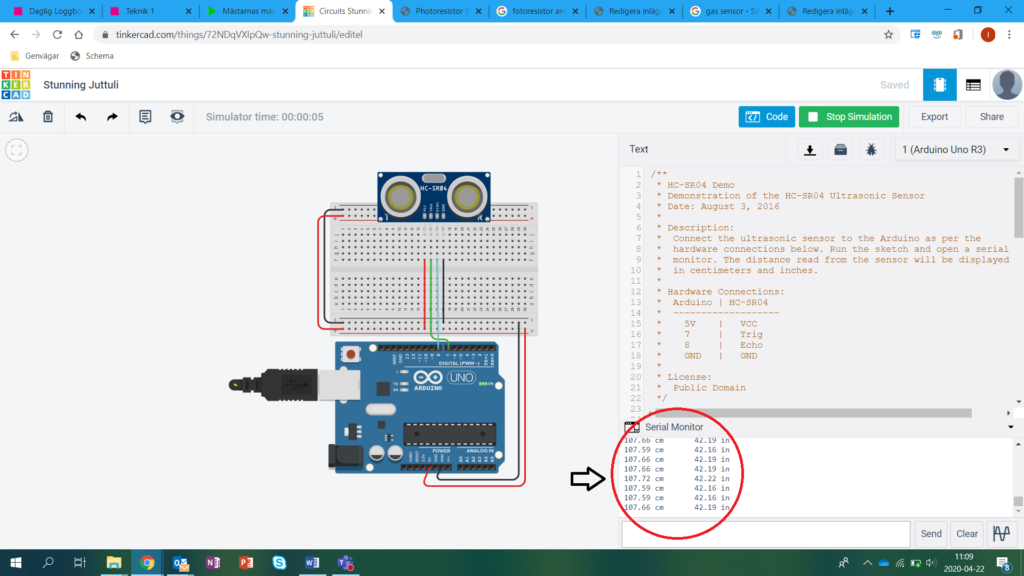
En ultrasonic- sensor är en sensor som kan mäta avstånd. Det som sensorn gör är att den skickar en signal och sedan återfår den. Så det som jag har gjort i Tinker CAD gör så att sensorn känner av om man kommer närmare den. Då kommer det upp olika siffror och då förstår man att den fungerar.
Om någon vill göra på liknande sätt som min koppling från Ultrasonic sensorn till Arduinon så gör du så här. Man behöver en kopplingsplatta, en Arduino, en Ultrasonic sensor och sladdar. Det är viktigt att Ultrasonic sensorn blir kopplad till rätt ställen på Arduinon så att allt fungerar som det ska göra. Man ansluter power till 5V, ground till ground och så kopplar man den också till 8 och 7 på Arduinon. Man behöver också skriva in en kod. Efter det så kan man testa att starta och se om det fungerar.
Koden till kretsen
/**
- HC-SR04 Demo
- Demonstration of the HC-SR04 Ultrasonic Sensor
- Date: August 3, 2016
- Description:
- Connect the ultrasonic sensor to the Arduino as per the
- hardware connections below. Run the sketch and open a serial
- monitor. The distance read from the sensor will be displayed
- in centimeters and inches.
- Hardware Connections:
- Arduino | HC-SR04
- ——————-
- 5V | VCC
- 7 | Trig
- 8 | Echo
- GND | GND
- License:
- Public Domain
*/
// Pins
const int TRIG_PIN = 7;
const int ECHO_PIN = 8;
// Anything over 400 cm (23200 us pulse) is ”out of range”
const unsigned int MAX_DIST = 23200;
void setup() {
// The Trigger pin will tell the sensor to range find
pinMode(TRIG_PIN, OUTPUT);
digitalWrite(TRIG_PIN, LOW);
// We’ll use the serial monitor to view the sensor output
Serial.begin(9600);
}
void loop() {
unsigned long t1;
unsigned long t2;
unsigned long pulse_width;
float cm;
float inches;
// Hold the trigger pin high for at least 10 us
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
// Wait for pulse on echo pin
while ( digitalRead(ECHO_PIN) == 0 );
// Measure how long the echo pin was held high (pulse width)
// Note: the micros() counter will overflow after ~70 min
t1 = micros();
while ( digitalRead(ECHO_PIN) == 1);
t2 = micros();
pulse_width = t2 – t1;
// Calculate distance in centimeters and inches. The constants
// are found in the datasheet, and calculated from the assumed speed
//of sound in air at sea level (~340 m/s).
cm = pulse_width / 58.0;
inches = pulse_width / 148.0;
// Print out results
if ( pulse_width > MAX_DIST ) {
Serial.println(”Out of range”);
} else {
Serial.print(cm);
Serial.print(” cm \t”);
Serial.print(inches);
Serial.println(” in”);
}
// Wait at least 60ms before next measurement
delay(60);
}
Källor:
https://www.lawicel-shop.se/sensorer-givare/ultrasonic-sensor-hc-sr04
https://codebender.cc/sketch:356078#HC-SR04%20Ultrasonic%20Sensor%20Ex